
Since programming and testing on the Raspberry Pi itself is not very productive, I have created a TCP/IP library to send commands to the ServoBlaster from a Windows .NET program. I named it PiEater. My Raspberry Pi has a WiFi USB token, so I can access it without the usage of cables.
I wrote the “Truck Driver” program for the MC-1:
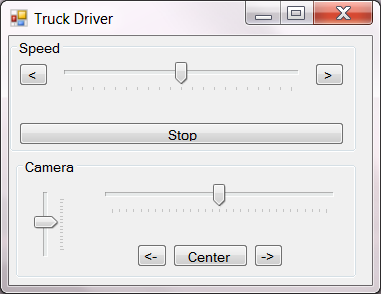
The speed slider changes the pulse width sent to the motors through the L293D. Since it is a little harder to find the center of the slider, I added a “Stop” button that does that. The slider allows going from full power to back to full power to front.
The camera position sliders act on the servos mounted under the camera. The “Center” button centers the camera in both horizontal and vertical axes.

One thought on “Day 21: MC-1 Part II: Software”